ARM Subroutine/procedure/function Calls
Objectives
Explore ARM subroutine calls and implement them in Keil uVision5.
- Using BL SUB_Name, and MOV PC, LR or BX LR
- Study and using stack
You have learned user defined functions in CS110 and procedure calls
in MIPS. In this lab, we need to deal with function/procedure call/return
in the ARM assembly lauguage environment.
ARM processors do not provide a fully automatic subroutine call/return mechanism like other processors. ARM's branch and link instruction, BL, automatically saves the return address in the register R14 (i.e. LR). We can use MOV PC, LR at the end of the subroutine to return back to the instruction after the subroutine call BL SUBROUTINE_NAME. A SUBROUTINE_NAME is a label in the ARM program.
ARM Unconditional and Conditional Subroutine Calls
Mnemonic Meaning ============================================================================== BL SUB_A ; Branch to SUB_A with link save return address in R14 ------------------------------------------------------------------------------ CMP R1, R2 ; branch conditionally BLLT SUB_B ; if R1 < R2, then branch to SUB_B BLLE SUB_C ; if R1 <= R3, then branch to SUB_C BLGT SUB_D ; if R1 > R2, then branch to SUB_D BLGE SUB_F ; if R1 >= R2, then branch to SUB_F ------------------------------------------------------------------------------ MOV PC, LR ; get the control of execution back after executing ; a subroutine/procedure ------------------------------------------------------------------------------ BX LR ; Return to the calling function ------------------------------------------------------------------------------ Using PROC and ENDP as a pair for procedures
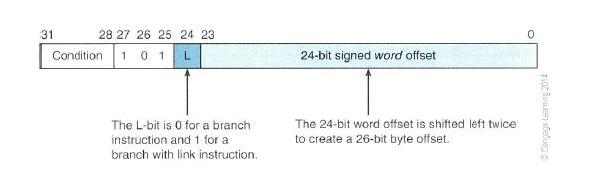
Here is the encoding format of ARM's branch and branch-with-link instructions for your reference.
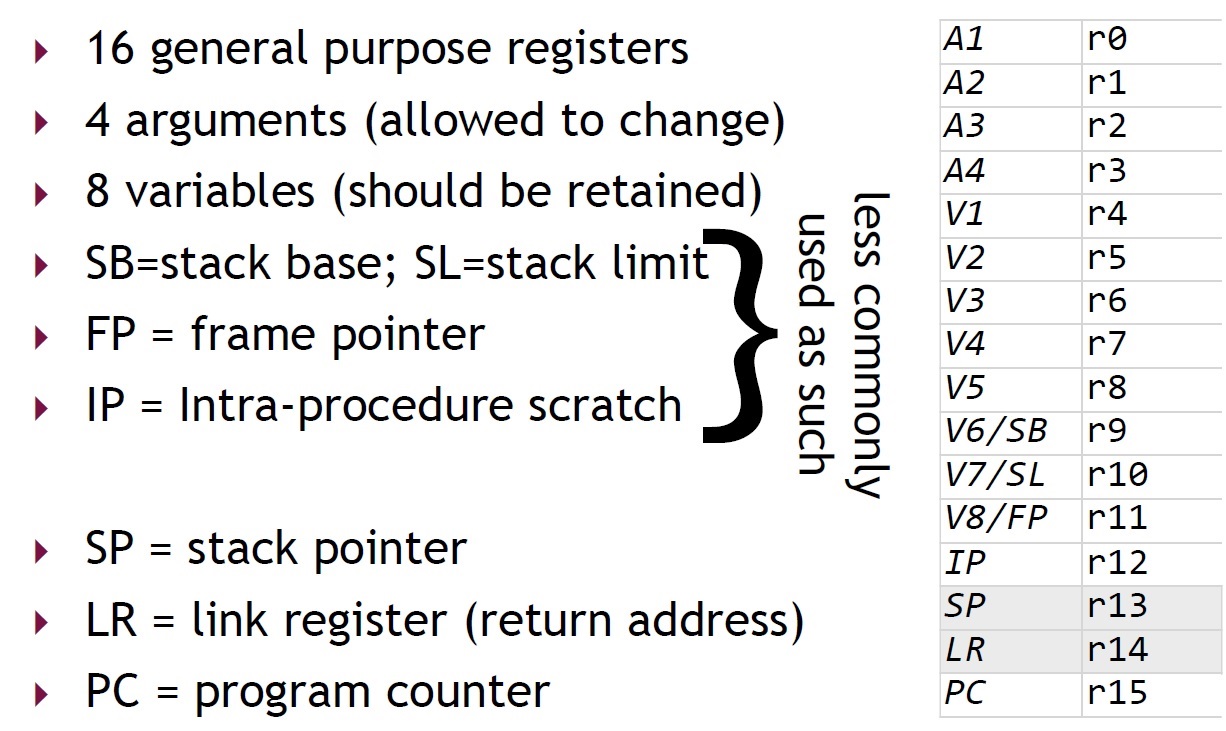
Register Use in the ARM Procudure Call Standard
An Example Using a Subroutine Call
;The semicolon is used to lead an inline documentation
;When you write your program, you could have your info at the top document lock
;For Example:
;;;;Your Name:
;;;;Student Number:
;;;;Lab#:
;;;;
;;; Directives
PRESERVE8
THUMB
;;; Equates
;; Empty
;;; Includes
;; Empty
;;; Vector Definitions
; Vector Table Mapped to Address 0 at Reset
; Linker requires __Vectors to be exported
AREA RESET, DATA, READONLY
EXPORT __Vectors
__Vectors
DCD 0x20001000 ; stack pointer value when stack is empty
DCD Reset_Handler ; reset vector
ALIGN
;Your Data section
;AREA DATA
SUMP DCD SUM
SUMP2 DCD SUM2
N DCD 5
AREA MYRAM, DATA, READWRITE
SUM DCD 0
SUM2 DCD 0
;; The program Linker requires Reset_Handler
AREA MYCODE, CODE, READONLY
ENTRY
EXPORT Reset_Handler
;;;;;Procedure definitions;;;;
SUMUP PROC
ADD R0, R0, R1 ;Add number into R0
SUBS R1, R1, #1 ;Decrement loop counter R1
BGT SUMUP ;Branch back if not done
;MOV PC, LR
BX LR
ENDP
;;;users main program;;;;;
Reset_Handler
LDR R1, N ;Load count into R1
MOV R0, #0 ;Clear accumulator R0
BL SUMUP
LDR R3, SUMP ;Load address of SUM to R3
STR R0, [R3] ;Store SUM
LDR R4, [R3]
MOV R7, #8
LDR R5, SUMP2 ;Load address of SUM2 to R5
STR R7, [R5] ;Store SUM2
LDR R6, [R5]
STOP
B STOP
END
Introduction to Stack
The stack is a data structure, known as last in first out (LIFO). In a stack, items entered at one end and leave in the reversed order. Stacks in microprocessors are implemented by using a stack pointer to point to the top of the stack in memory. As items are added to the stack (pushed), the stack pointer is moving up, and as items are removed from the stack (pulled or popped), the stack pointer is moved down.
Here is a picture to show the idea of Stack LIFO structure.

The picture is adopted from this page.
Stack Types
ARM stacks are very flexible since the implementation is completely left to the software. Stack pointer is a register that points to the top of the stack. In the ARM processor, any one of the general purpose registers could be used as a stack pointer. Since it is left to the software to implement a stack, different implemenation choices result different types of stacks. Normally, there are two types of the stacks depending on which way the stack grows.
1. Ascending Stack - When items are pushed on to the stack, the stack pointer is increasing. That means the stack grows towards higher address. 2. Descending Stack - When items are pushed on to the stack, the stack pointer is decreasing. That means the stack is growing towards lower address.Depending on what the stack pointer points to we can categorize the stacks into the following two types:
1. Empty Stack - Stack pointer points to the location in which the next/first item will be stored. e.g. A push will store the value, and increment the stack pointer for an Ascending Stack. 2. Full Stack - Stack pointer points to the location in which the last item was stored. e.g. A pop will decrement the stack pointer and pull the value for an Ascending Stack.So now we can have four possible types of stacks. They are
- full-ascending stack,
- full-descending stack,
- empty-ascending stack,
- empty-descending stack.
Here are some instructions used to deal with stack:
Push registers onto and pop registers off a full-descending stack.
Examples:
PUSH {R0, R4-R7} ;Push R0, R4, R5, R6, R7 onto the stack
PUSH {R2, LR} ;Push R2 and the link register onto the stack
POP {R0, R6, LR} ;Pop R0, R6, and LR from the stack
POP {R0, R5, PC} ;Pop R0, R5, and PC from the stack
;then branch to the new PC
=============================================================================
Reference: Cortex-M3 Devices Generic User Guide. Page 3-29 to 3-30.
Subroutine and Stack
A subroutine call can be implemented by pushing the return address on the stack and then jumping to the branch target address. When the subroutine is done, remember to pop out the saved information so that it will be able to return to the next instruction immediately after the calling point.
An Example of Using Stack
;; Put your name and a title for the program here
;;
;;; Directives
PRESERVE8
THUMB
;;; Equates
;;; The EQU directive gives a symbolic name to a numeric constant,
;;; a register-relative value or a PC-relative value.
;;; Use EQU to define constants.
INITIAL_MSP EQU 0x20001000 ; Initial Main Stack Pointer Value
; Allocating 1000 bytes to the stack as it grows down.
; RAM starts at address 0x20000000
; Vector Table Mapped to Address 0 at Reset
; Linker requires __Vectors to be exported
AREA RESET, DATA, READONLY
EXPORT __Vectors
__Vectors DCD INITIAL_MSP ; stack pointer value when stack is empty
DCD Reset_Handler ; reset vector
ALIGN
; The program
; Linker requires Reset_Handler
AREA MYCODE, CODE, READONLY
ENTRY
EXPORT Reset_Handler
ALIGN
;;; Define Procedures
function1 PROC ;Using PROC and ENDP for procedures
PUSH {R5,LR} ;Save values in the stack
MOV R5,#8 ;Set initial value for the delay loop
delay
SUBS R5, R5, #1
BNE delay
POP {R5,PC} ;pop out the saved value from the stack,
;check the value in the R5 and if it is the saved value
ENDP
;;;;;;;user main program;;;;;;;;
Reset_Handler
MOV R0, #0x75
MOV R3, #5
PUSH {R0, R3} ;Notice the stack address is 0x200000FF8
MOV R0, #6
MOV R3, #7
POP {R0, R3} ;Should be able to see R0 = #0x75 and R3 = #5 after pop
Loop
ADD R0, R0, #1
CMP R0, #0x80
BNE Loop
MOV R5, #9 ;; prepare for function call
BL function1
MOV R3, #12
stop
B stop
END
Lab Assignment
![]() Copyright: Department of Computer Science, University of Regina.
Copyright: Department of Computer Science, University of Regina.